
V1 PowerPoint PPT Presentation
1 / 22
Title: V1
1
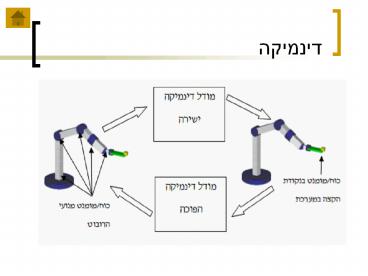
???????
2
??????? ??????
- ?????
- ??????
- ???????????
V
Trapezoid
V1
t
t1
3
?????? ?????? ????
- ????? ????? ????????? (??? ?????? ????? ?????)
- ????? ??? ?????? ????? ????????? ?? ??????
?????? ?????????. - ????? ??????? ?????? ???? ??????? ?? ??? ??????
?? ????? ?????????.
4
?????
- ???? ????? ????? ??? 3 ????? ???? ????. ?????? ??
?????? (0,0,0) ?????? (100,200,300). ????? ??
???? ??? 100 ??/????2. ?????? ?? ???? 100
??/????. ?? ???? ?? ??? ?????? ????? ??? ??????
?????? ?? ?? ????.
5
Example
6
Solution
- Our example
Number of equation 2
Unknown variables 3
7
Redundancy
- System DOF gt End Effector DOF
8
Redundancy
- A redundant system has infinite number of
solutions - Human skeleton has 70 DOF
- Ultra-super redundant
- How to solve highly redundant system?
- Multiple choices for one goal
- We can exploit redundancy
9
Redundancy
- Additional objective
- Minimal Change
- Similarity to Given Example
- Naturalness
- Based on observation of natural human posture
- Neurophysiological experiments
10
Robot Motion Planning
- Path planning
- Geometric path
- Issues obstacle avoidance, shortest path
- Trajectory planning,
- interpolate or approximate the desired path
by a class of polynomial functions and generates
a sequence of time-based control set points for
the control of manipulator from the initial
configuration to its destination.
11
Trajectory Planning
12
Trajectory planning
- Path Profile
- Velocity Profile
- Acceleration Profile
13
The boundary conditions
- Initial position, velocity, acceleration
- Continuity in position ,in velocity, in
acceleration - Final position, velocity, acceleration
14
Economic Consideration of Robotic System
- Plan and Equipment
- Operation and Maintenance
- Product
- Parameters of Analysis
15
??????
16
?????
- ?????? ????? ??? ?????
- ???? ?????
- ??? ??????
- ????? ??? ?????
- ????
- ???????
- ??? ?????
- ????? ??????
- ????? ?? ????? (???? / ??????????)
17
?????
- ?????
- ?????? ?? ??????
- ?? ??????
- ????? ??????? ?? ?? ??????
- ????? ?? ?????
- ????? ????? ?????? ???????
- ?????
- ????? ??????
- ????? ??????
18
????? ??????
- ???? 1 - ???? ?? ??????
- ???? 2 ???? ?? ??????
- ???? 3 ???? ??? ?????? ?? ??????
19
????? ?? ????? - ?????
- ???? ????? ?? ????? ??????. ?????? ???? ??????
?????? ?? ??? ??????. ????? ?????? ??? ??????
??????.
20
?????
- ???? ???? ?? ??????? ?????? ?????. ??? ???? ???
????? ?? ???? ???? ??? ??????? ???? ??????. ????
????? ????? ??????? ????? ????? ??? ????? ???.
21
????? ?? ????? - ?????
22
(No Transcript)
Recommended
