
Solving Markov Random Fields using Second Order Cone Programming PowerPoint PPT Presentation
Title: Solving Markov Random Fields using Second Order Cone Programming
1
Solving Markov Random Fields using Second Order
Cone Programming
Andrew Zisserman http//www.robots.ox.ac.uk/vgg
M. Pawan Kumar Philip H.S. Torr http//cms.brookes.ac.uk/computervision
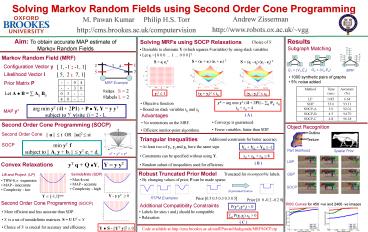
Aim To obtain accurate MAP estimate of Markov
Random Fields
Results
Solving MRFs using SOCP Relaxations
Choice of S
Subgraph Matching
- Desirable to eliminate Y (which squares
variables) by using slack variables.
- Let ei 0 0 0 1 0 0 0 T
Markov Random Field (MRF)
S (ei ej) (ei ej) T
S ei eiT
S (ei - ej) (ei - ej) T
1
2
1, -1 -1, 1
3
Configuration Vector y
4
G2 (V2,E2)
G1 (V1,E1)
MRF
5
7
5, 2 7, 1
Likelihood Vector l
- 1000 synthetic pairs of graphs
- 5 noise added
Prior Matrix P
- - 0 4
- - 3 0
0 3 - -
4 0 - -
MRF Example
Method Time (sec) Accuracy ()
LP 0.85 6.64
SDP 35.0 93.11
SOCP-A 3.0 92.01
SOCP-B 4.5 94.79
SOCP-C 4.8 96.18
sites S 2 labels L 2
Let A ? B ? Aij Bij
yi2 ? 1
(yi yj)2 ? tij
(yi - yj)2 ? zij
y arg min yT (4l 2P1) - ?ij Pij zij
- Objective function
arg min yT (4l 2P1) P ? Y, Y y yT subject
to ? y(site i) 2 - L
tij zij 4
- Bound on slack variables tij and zij
MAP y
Advantages
( A )
- Converge is guaranteed.
- No restrictions on the MRF.
Second Order Cone Programming (SOCP)
Object Recognition
- Fewer variables, faster than SDP.
- Efficient interior-point algorithms.
Outline
Second Order Cone
u ? t OR u2 ? st
Triangular Inequalities
Additional constraints for better accuracy.
Texture
min yT f subject to Ai y bi ? yT ci di
SOCP
- At least two of yi, yj and yk have the same
sign.
Yij Yjk Yik ? -1
Part likelihood
Spatial Prior
x2 y2 z2
- Constraints can be specified without using Y.
zij zjk zik ? 8
LBP
( B )
yT q Q ?Y, Y y yT
Convex Relaxations
- Random subset of inequalities used for
efficiency.
Robust Truncated Prior Model
Truncated for incompatible labels.
GBP
Semidefinite (SDP)
Lift and Project (LP)
- By changing values of prior, P can be made
sparse.
- Max-k-cut
- MAP - accurate
- Complexity - high
- TRW-S,? -expansion
- MAP - inaccurate
- Complexity - low
SOCP
Reparametrization
Y - y yT ? 0
Y ? -1,1nxn
Prior 0.5 0.5 0.3 0.3 0.5
RTPM Examples
Prior 0 0 -0.2 -0.2 0
Second Order Cone Programming (SOCP)
ROC Curves for 450 ve and 2400 -ve images
Additional Compatibility Constraints
P(yi,yj) lt 0
- More efficient and less accurate than SDP.
- Labels for sites i and j should be compatible
?ij P(yi,yj) zij gt 0
- Relaxation
- S is a set of semidefinite matrices. S U UT ?
S
( C )
- Choice of S is crucial for accuracy and
efficiency.
Y ? S - UT y2 ? 0
Code available at http//cms.brookes.ac.uk/staff/P
awanMudigonda/MRFSOCP.zip
Recommended
