
Microelectronics PowerPoint PPT Presentation
1 / 1
Title: Microelectronics
1
3D Shape Classification Using Conformal Mapping
Advisor StudentDr. Jia Li Shaojun LiuDept. of
Computer Science and Engineering, Oakland
University
To extract the geometric features of 3D objects,
it is convenient to map the surface onto the
region of the plane or sphere first. As the
conformal mapping is one-to-one and angle
preserving, we take the normal vectors as the
geometric feature, and then conformally map them
onto sphere. Fig. 2 shows some mapped results,
named spherical normal image (SNI). The geometric
features in our approach, SNI, is then decomposed
by spherical harmonics, whose coefficients
constitute a feature vector to be used for shape
classification.
- 1. Abstract
A new method for 3D shape classification based on
conformal mapping of 3D meshes is introduced. We
propose to conformally map 3D meshes to the
domain of unit sphere, which generates geometry
images and normal maps over the sphere. Then the
spherical harmonic representation of the normal
map is used as the feature vector input of the
self-organizing map for shape classification.
This method can evade the common object center
estimation and preserve the geometric details.
The results demonstrate that the proposed method
can discriminate the collected 3D shapes very
well, and is robust to noise, tesselations and
pose difference.
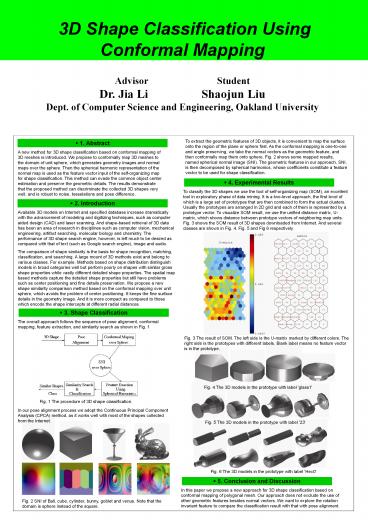
- 4. Experimental Results
To classify the 3D shapes we use the tool of
self-organizing map (SOM), an excellent tool in
exploratory phase of data mining. It is a
two-level approach, the first level of which is a
large set of prototypes that are then combined to
form the actual clusters. Usually the prototypes
are arranged in 2D grid and each of them is
represented by a prototype vector. To visualize
SOM result, we use the unified distance matrix,
U-matrix, which shows distance between prototype
vectors of neighboring map units. Fig. 3 shows
the SOM result of 3D shapes downloaded from
Internet. And several classes are shown in Fig.
4, Fig. 5 and Fig 6 respectively.
- 2. Introduction
Available 3D models on Internet and specified
database increase dramatically with the
advancement of modeling and digitizing
techniques, such as computer aided design (CAD)
and laser scanning. And shape-based retrieval of
3D data has been an area of research in
disciplines such as computer vision, mechanical
engineering, artifact searching, molecular
biology and chemistry. The performance of 3D
shape search engine, however, is left much to be
desired as compared with that of text (such as
Google search engine), image and audio. The
comparison of shape similarity is the basis for
shape recognition, matching, classification, and
searching. A large mount of 3D methods exist and
belong to various classes. For example, Methods
based on shape distribution distinguish models in
broad categories well but perform poorly on
shapes with similar gross shape properties while
vastly different detailed shape properties. The
spatial map based methods capture the detailed
shape properties but still have problems such as
center positioning and fine details preservation.
We propose a new shape similarity comparison
method based on the conformal mapping over unit
sphere, which avoids the problem of center
positioning. It keeps the fine surface details in
the geometry image. And it is more compact as
compared to those which encode the shape
intercepts at different radial distances.
- 3. Shape Classification
The overall approach follows the sequence of pose
alignment, conformal mapping, feature extraction,
and similarity search as shown in Fig. 1
Fig. 3 The result of SOM. The left side is the
U-matrix marked by different colors. The right
side is the prototypes with different labels.
Blank label means no feature vector is in the
prototype.
Fig. 4 The 3D models in the prototype with label
'glass1'
Fig. 1 The procedure of 3D shape classification.
In our pose alignment process we adopt the
Continuous Principal Component Analysis (CPCA)
method, as it works well with most of the shapes
collected from the Internet.
Fig. 5 The 3D models in the prototype with label
'23'
Fig. 6 The 3D models in the prototype with label
'Hex0'
- 5. Conclusion and Discussion
In this paper we propose a new approach for 3D
shape classification based on conformal mapping
of polygonal mesh. Our approach does not exclude
the use of other geometric features besides
normal vectors. We want to explore the rotation
invariant feature to compare the classification
result with that with pose alignment.
Fig. 2 SNI of Ball, cube, cylinder, bunny, goblet
and venus. Note that the domain is sphere instead
of the square.
Recommended
