
IEEE ICRA'07 Digest Template PowerPoint PPT Presentation
Title: IEEE ICRA'07 Digest Template
1
BLUE A Bipedal Robot with Variable Stiffness and
Damping
Alexander Enoch, Andrius Sutas, Shin'ichiro
Nakaoka and Sethu Vijayakumar IPAB,
University of Edinburgh, United Kingdom
Intelligent Systems Research Institute, AIST,
Japan
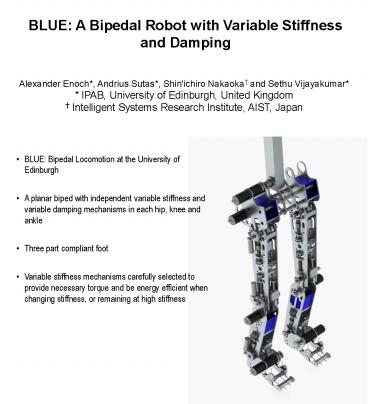
- BLUE Bipedal Locomotion at the University of
Edinburgh - A planar biped with independent variable
stiffness and variable damping mechanisms in each
hip, knee and ankle - Three part compliant foot
- Variable stiffness mechanisms carefully selected
to provide necessary torque and be energy
efficient when changing stiffness, or remaining
at high stiffness
Recommended
