
Powered Arm Orthosis to Augment Arm PowerPoint PPT Presentation
1 / 1
Title: Powered Arm Orthosis to Augment Arm
1
Powered Arm Orthosis to Augment Arm
Function in Persons with Disabilities Daniel
Abramovich Michael Scarsella Steven
Toddes Advisor Professor Allen
Hoffman Mechanical Engineering Department
Mechanical Analysis Prior to manufacturing,
stress analyses were conducted to ensure the
prevention of failure under the maximum loading
conditions. A Finite Element Analysis was
performed on the elbow joint sprocket and other
critical components to see how they would perform
under the maximum loading conditions. Stress
calculations on the elbow flexion worm determined
the relationship between safety factor and
applied torque on the worm under maximum loading.
Overview Duchennes Muscular Dystrophy (DMD) is
a degenerative genetic disease occurring
primarily in adolescent males. DMD results in a
deterioration of muscle tissue causing afflicted
persons to be wheelchair bound. Those afflicted
with DMD typically lose muscle function in their
limbs proximally to distally, leaving them with
only minor tactile function in their hands by
their teenage years, resulting in limited
independence. Patients will generally require
assistance in completing activities of daily
living (ADLs), such as brushing teeth, fork
feeding, and combing hair. Orthotic devices have
helped DMD patients regain small levels of
independence by helping to recreate movements
within their arms. By designing a powered arm
orthosis with a comprehensive control system, DMD
patients could operate a mechanism that would
allow them to complete ADLs with minimal
assistance, thereby restoring their
independence. Abstract Muscular Dystrophy, and
other similar afflictions, where articulation of
arm muscles is hindered, can severely impact the
quality of life. By creating a wearable,
electromechanically powered arm orthosis,
strength no longer available to the arm muscles
is augmented and controlled by the user, thereby
restoring arm function. In the design produced,
a wearable orthosis controlled by joystick
allowed the user to lift his own arm plus an
additional 3 lbs in weight. The device
incorporated 2 degrees of freedom or DOF (elbow
flexion and humeral rotation) that can be
controlled independently or simultaneously. With
the use of the powered orthosis, daily tasks were
achieved at a rate that was only 70 slower than
that of a normally functioning person. Project
Objectives The goal of this project was to
develop and build a powered arm orthosis for
clients with symptoms of or similar to Muscular
Dystrophy, in order to aid in tasks of daily
living improving independence and quality of
life. To obtain the desired level of quality,
the design would have to meet specifications in
the following categories ?Comfort
?Safety ?Aesthetics ?Ease of use
?Functionality ?Durability
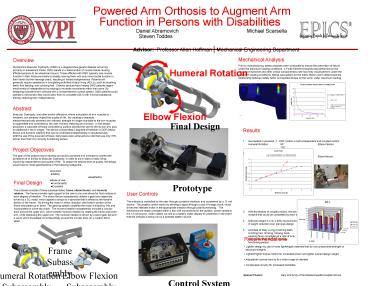
Humeral Rotation
Elbow Flexion
- Results
- 1. Succeeded in powered, 2 - DOF motion in both
independent and coupled motion. - Humeral Rotation 95 Elbow Flexion 110
- 2. Prototype Load Capacity vs. Original Task
Specifications - Humeral rotation 166 Elbow flexion 120
Final Design
Final Design The orthosis consists of three
subassemblies frame, elbow flexion, and humeral
rotation. The frame provides rigid support to
the users arm and allows for fluid motions in
each degree of freedom. The elbow flexion
subassembly utilizes a gear train assembly,
driven by a DC motor, which applies a torque to a
sprocket that is affixed to the forearm portion
of the frame. By driving the motor in either
direction, the forearm portion of the frame
articulates up or down. The gearing system
amplifies the motors torque by 54x and
incorporates an inline slip clutch. The humeral
rotation subassembly includes a circular track
around the upper arm, which creates humeral
rotation by rotating the frame and lower arm,
while stabilizing the upper arm. The humeral
rotation is driven by a bevel gear set and a worm
which translates circumferentially around the
circular track on a custom delrin slider.
Prototype
User Controls The orthosis is controlled by the
user through a joystick interface, and is powered
by a 12 volt source. The joystick control works
by sending a signal through a dual H-bridge
circuit, which drives the intended motor in the
appropriate direction through polarity switching.
The electronics are neatly arranged within a
box with connections for the joystick, power
cables to the 12 volt source, motor cables, as
well as a battery meter display for protection in
the event that the orthosis is being run by a
portable battery source.
- Recommendations
- Lighten design by use of more lightweight
materials that do not compromise strength or - structural integrity
- Lighter/Higher torque motors for increased power
and lighter overall design weight - Adjustable humeral bars to fit a wider range of
clientele - Condensed circuitry for increased portability
Frame Subassembly
Elbow Flexion Subassembly
Humeral Rotation Subassembly
Special Thanks Gary and Andy of the
Massachusetts Hospital School
Control System
Recommended
