
Learning Inverse Model PowerPoint PPT Presentation
1 / 3
Title: Learning Inverse Model
1
Learning Inverse Model
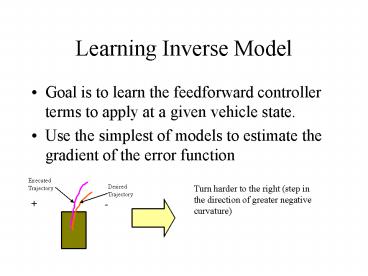
- Goal is to learn the feedforward controller terms
to apply at a given vehicle state. - Use the simplest of models to estimate the
gradient of the error function
Executed Trajectory
Desired Trajectory
Turn harder to the right (step in the direction
of greater negative curvature)
-
2
Feed Forward Control
- Can reduce the effect of a measured disturbance
3
Possible Evolution of Development
State Space
Learned Representation
Performance Evaluation
Roll, Pitch, Angular Velocity, Linear Velocity
Heuristic Policy Table
Inspection of Heuristic Table
Soil Type, Suspension Pressures and Arm
Angles
Performance Relative To Current Forward Model
Function Approximator
Supporting Surface Estimate
Performance Relative To New Forward Models
Recommended
