
Office of the Future 1998 PowerPoint PPT Presentation
Title: Office of the Future 1998
1
Office of the Future1998
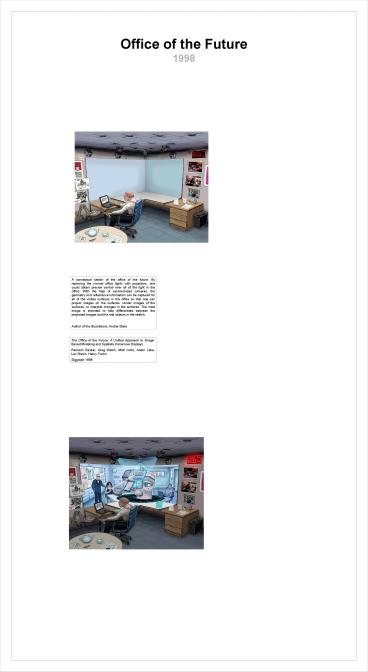
A conceptual sketch of the office of the future.
By replacing the normal office lights with
projectors, one could obtain precise control over
all of the light in the office. With the help of
synchronized cameras, the geometry and
reflectance information can be captured for all
of the visible surfaces in the office so that one
can project images on the surfaces, render images
of the surfaces, or interpret changes in the
surfaces. The inset image is intended to help
differentiate between the projected images and
the real objects in the sketch. Author of the
illustrations Andrei State
The Office of the Future A Unified Approach to
Image-Based Modeling and Spatially Immersive
Displays Ramesh Raskar, Greg Welch, Matt Cutts,
Adam Lake, Lev Stesin, Henry Fuchs Siggraph 1998
2
Shader Lamps - Taj Mahal2001
We are used to looking at the output of a
computer graphics program on a monitor or on a
screen. But, how can we see the "special effects"
directly in our environment ? For example, how
can we make a clay vase sitting on a table look
like it is made up of gold, with fine details ?
The appearance of an object is a function of
illumination, surface reflectance and viewer
location. Hence, we can rearrange the factors
along the optical path and reproduce the
equivalent desired appearance. We have recently
introduced a new paradigm and related techniques
to graphically animate physical objects with
projectors. Because the approach is to
effectively "lift" the visual properties of the
object into the projector, we call the projectors
shader lamps. We address the central issue of
complete illumination of non-trivial physical
objects using multiple projectors and present a
set of new techniques that make the process of
illumination practical. We show some results and
describe the new challenges in graphics,
geometry, vision and user interfaces. www.cs.unc.e
du/raskar/Shaderlamps/abstract.txt
Raskar, R. Welch, G. Low, K-L. Bandyopadhyay,
D., "Shader Lamps Animating Real Objects with
Image Based Illumination", Eurographics Workshop
on Rendering, June 2001
3
Image Fusion2004
Glass world
Flowchart for asymmetric fusion. Importance image
is derived from only the night time image. Mixed
gradient field is created by linearly blending
intensity gradients.
We present a class of image fusion techniques to
automatically combine images of a scene captured
under different illumination. Beyond providing
digital tools for artists for creating surrealist
images and videos, the methods can also be used
for practical applications. For example, the
non-realistic appearance can be used to enhance
the context of nighttime traffic videos so that
they are easier to understand. The context is
automatically captured from a fixed camera and
inserted from a day-time image (of the same
scene). Our approach is based on a gradient
domain technique that preserves important local
perceptual cues while avoiding traditional
problems such as aliasing, ghosting and haloing.
We presents several results in generating
surrealistic videos and in increasing the
information density of low quality nighttime
videos.
Day Image
Image Fusion for Context Enhancement and Video
Surrealism R Raskar, A Ilie, J Yu ACM
Nonphotorealistic Animation and Rendering (NPAR)
2004, Annecy, France
Context Enhanced Image
Night Image
Automatic context enhancement of a night time
scene. The image is reconstructed from a gradient
field. The gradient field is a linear blend of
intensity gradients of the night time image and a
corresponding day time image of the same scene.
Stylization by mosaicing vertical strips of a day
to night sequence (Left) Naive algorithm
(Right)The output of our algorithm.
4
RFIG Application Examples2004
Finding millimeter-precise RFID location using a
handheld RF reader and pocket projector without
RF collision A photosensor is embedded in the
RFID tag. A coded illumination via pocket
projector locates the tag. The computer generated
labels are projected and overlay the object
creating augmented reality (AR).
We describe how to instrument the physical world
so that objects become self-describing,
communicating their identity, geometry, and other
information such as history or user annotation.
The enabling technology is a wireless tag which
acts as a radio frequency identity and geometry
(RFIG) transponder. We show how addition of a
photo-sensor to a wireless tag significantly
extends its functionality to allow geometric
operations - such as finding the 3D position of a
tag, or detecting change in the shape of a tagged
object. Tag data is presented to the user by
direct projection using a handheld locale-aware
mobile projector. We introduce a novel technique
that we call interactive projection to allow a
user to interact with projected information e.g.
to navigate or update the projected
information. The work was motivated by the
advent of unpowered passive-RFID, a technology
that promises to have significant impact in
real-world applications. We discuss how our
current prototypes could evolve to passive-RFID
in the future.
RFIG Lamps Interacting with Self-describing
World via Photosensing Wireless Tags and
Projectors R Raskar, P Beardsley, J vanBaar, Y
Wang, P Dietz, J Lee, D Leigh, T
Willwacher SIGGRAPH 2004
(Left) Detecting an obstruction (such as person
on the tracks near a platform, a disabled vehicle
at a railroad intersection, or suspicious
material on the tracks). Identifying an
obstruction with a camera-based system is
difficult, owing to the necessary complex image
analysis under unknown lighting conditions. RFIG
tags can be sprinkled along the tracks and
illuminated with a fixed or steered beam of
temporally modulated light (not necessarily a
projector). Tags respond with the status of the
reception of the modulated light. Lack of
reception indicates an obstruction a notice can
then be sent to a central monitoring facility
where a railroad traffic controller observes the
scene, perhaps using a pan-tilt-zoom surveillance
camera. (Middle) Books in a library. RF-tagged
books make it easy to generate a list of titles
within the RF range. However, incomplete location
information makes it difficult to determine which
books are out of alphabetically sorted order. In
addition, inadequate information concerning book
orientation makes it difficult to detect whether
books are placed upside down. With RFIG and a
handheld projector, the librarian can identify
book title, as well as the books physical
location and orientation. Based on a mismatch in
title sort with respect to the location sort, the
system provides instant visual feedback and
instructions (shown here as red arrows for
original positions). (Right) Laser-guided robot.
Guiding a robot to pick a certain object in a
pile of objects on a moving conveyor belt, the
projector locates the RFIG-tagged object,
illuminating it with an easily identifiable
temporal pattern. A camera attached to the robot
arm locks onto this pattern, enabling the robot
to home in on the object.
5
Multiflash Edge Detection2004
Imagine a camera, no larger than existing digital
cameras, that can directly find depth edges. As
we know, a flash to the left of a camera creates
a sliver of shadow to the right of each
silhouette (depth discontinuity) in the image. We
add a flash on the right, which creates a sliver
of shadow to the left of each silhouette, a flash
to the top and bottom. By observing the shadows,
one can robustly find all the pixels
corresponding to shape boundaries (depth
discontinuities). This is a strikingly simple way
of calculating depth edges.
Paper Non-photorealistic Camera Depth Edge
Detection and Stylized Rendering using
Multi-Flash Imaging R Raskar, K Tan, R Feris, J
Yu, M Turk SIGGRAPH 2004
Glass of wine after work
One screenshot from a research submission video
created in march 2007. You can see a glass filled
with wine and a flower in front. The light
transport through the glass is calculated in real
time.
6
Non-photorealistic Camera2004
Texture de-emphasized rendering.
We present a non-photorealistic rendering
approach to capture and convey shape features of
real-world scenes. We use a camera with multiple
flashes that are strategically positioned to cast
shadows along depth discontinuities in the scene.
The projective-geometric relationship of the
camera-flash setup is then exploited to detect
depth discontinuities and distinguish them from
intensity edges due to material discontinuities.
We introduce depiction methods that utilize the
detected edge features to generate stylized
static and animated images. We can highlight the
detected features, suppress unnecessary details
or combine features from multiple images. The
resulting images more clearly convey the 3D
structure of the imaged scenes. We take a very
different approach to capturing geometric
features of a scene than traditional approaches
that require reconstructing a 3D model. This
results in a method that is both surprisingly
simple and computationally efficient. The entire
hardware/software setup can conceivably be
packaged into a self-contained device no larger
than existing digital cameras.
Paper Non-photorealistic Camera Depth Edge
Detection and Stylized Rendering using
Multi-Flash Imaging R Raskar, K Tan, R Feris, J
Yu, M Turk SIGGRAPH 2004
Texture de-emphasized rendering.
Color assignment. (a) Attenuation Map (b)
Attenuated Image (c) Colored edges on
de-emphasized texture
7
Qualitative Depth2005
We use a single multi-flash camera to derive a
qualitative depth map based on two important
measurements the shadow width, which encodes
object relative distances, and the sign of each
depth edge pixel, which indicates which side of
the edge corresponds to the foreground and
background. Based on this measurements, we create
a depth gradient field and integrate it by
solving a Poisson equation. The resultant map
effectively segments objects in the scene,
providing depth-order relations.
Discontinuity preserving stereo with small
baseline multi-flash illumination Feris, R.
Raskar, R. Longbin Chen Kar-Han Tan Turk,
M. International Conference on Computer Vision,
2005.
8
Flash and Ambient Images2005
Flash images are known to suffer from several
problems saturation of nearby objects, poor
illumination of distant objects, reflections of
objects strongly lit by the flash and strong
highlights due to the reflection of flash itself
by glossy surfaces. We propose to use a flash and
no-flash (ambient) image pair to produce better
flash images. We present a novel gradient
projection scheme based on a gradient coherence
model that allows removal of reflections and
highlights from flash images. We also present a
brightness-ratio based algorithm that allows us
to compensate for the falloff in the flash image
brightness due to depth. In several practical
scenarios, the quality of flash/no-flash images
may be limited in terms of dynamic range. In such
cases, we advocate using several images taken
under different flash intensities and exposures.
We analyze the flash intensity-exposure space and
propose a method for adaptively sampling this
space so as to minimize the number of captured
images for any given scene. We present several
experimental results that demonstrate the ability
of our algorithms to produce improved flash
images.
Removing Photography Artifacts Using Gradient
Projection and Flash-Exposure Sampling A Agrawal,
R Raskar, S Nayar, Y Li SIGGRAPH 2005
9
Image Refocusing2007
Input Blurred Image
Refocused Image
Input Blurred Image Sharpened in PhotoShop
Encoded Blur Camera, i.e. with mask in the
aperture, can high spatial images frequencies in
the defocus blur. Notice the glint in the eye. In
the misfocused photo, on the left, the bright
spot appears blurred with the bokeh of the chosen
aperture (shown in the inset). In the deblurred
result, on the right, the details on the eye are
correctly recovered
Dappled Photography Mask Enhanced Cameras for
Heterodyned Light Fields and Coded Aperture
Refocusing Ashok Veeraraghavan, Ramesh Raskar,
Amit Agrawal, Ankit Mohan and Jack Tumblin ACM
SIGGRAPH 2007
Captured Blurred Photo
Refocused Image on Person
10
The Poor Man's Palace2005
What are the potential great challenges and
research topics in Interactive Computer Graphics?
Today, great advances in photorealistic image
synthesis allow us to enjoy special effects but
they remain on flat screens in movies and in
video games. But in the future, will special
effects have some bearing on the daily life of an
average person? Can we develop new computer
graphics techniques, algorithm as well as
capture, interface and display devices that will
empower humans every second of their life? We
must strive to bring those special effects into
the real world. The challenge in bringing those
visual effects into the real world is to make the
experience aesthetic, seamless and natural. One
may classify this problem as a futuristic
'Augmented Reality' and the VR and AR community
has made big strides in solving the pieces of the
puzzle. Recently we have seen a range of
practical solutions using Spatially Augmented
Reality (SAR). In place of eye-worn or hand held
displays, Spatial Augmented Reality methods
exploit video projectors, cameras, radio
frequency tags such as RFID, large optical
elements, holograms and tracking technologies. So
far, SAR research has taken only baby steps in
supporting programmable reflectance, virtual
illumination, synthetic motion and untethered
interaction. Emerging novel display technologies,
innovations in sensors and advances in material
science, have the potential to enable broader
applications. But the next big challenge for
Computer Graphics and HCI is to exploit these
innovations and deliver daily benefits for the
common man via a powerful infusion of synthetic
elements in the real world.
Recommended
