
PowerPoint-Pr - PowerPoint PPT Presentation
Title: PowerPoint-Pr
1
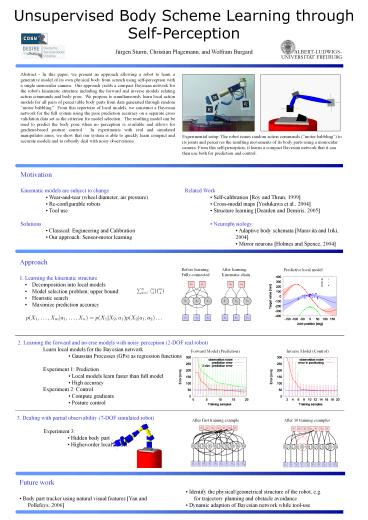
Unsupervised Body Scheme Learning through
Self-Perception
Jürgen Sturm, Christian Plagemann, and Wolfram
Burgard
Abstract - In this paper, we present an approach
allowing a robot to learn a generative model of
its own physical body from scratch using
self-perception with a single monocular camera.
Our approach yields a compact Bayesian network
for the robot's kinematic structure including the
forward and inverse models relating action
commands and body pose. We propose to
simultaneously learn local action models for all
pairs of perceivable body parts from data
generated through random motor babbling.'' From
this repertoire of local models, we construct a
Bayesian network for the full system using the
pose prediction accuracy on a separate cross
validation data set as the criterion for model
selection. The resulting model can be used to
predict the body pose when no perception is
available and allows for gradient-based posture
control. In experiments with real and simulated
manipulator arms, we show that our system is able
to quickly learn compact and accurate models and
to robustly deal with noisy observations.
Experimental setup The robot issues random
action commands (motor babbling) to its joints
and perceives the resulting movements of its body
parts using a monocular camera. From this
self-perception, it learns a compact Bayesian
network that it can then use both for prediction
and control.
- Motivation
- Kinematic models are subject to change
- Wear-and-tear (wheel diameter, air pressure)
- Re-configurable robots
- Tool use
- Solutions
- Classical Engineering and Calibration
- Our approach Sensor-motor learning
- Related Work
- Self-calibration Roy and Thrun, 1999
- Cross-modal maps Yoshikawa et al., 2004
- Structure learning Dearden and Demiris, 2005
- Neurophysiology
- Adaptive body schemata Maravita and Iriki,
2004 - Mirror neurons Holmes and Spence, 2004
- Approach
- 1. Learning the kinematic structure
- Decomposition into local models
- Model selection problem, upper bound
- Heuristic search
- Maximize prediction accuracy
Before learning Fully-connected
After learning Kinematic chain
Predictive local model
- 2. Learning the forward and inverse models with
noisy perception (2-DOF real robot) - Learn local models for the Bayesian network
- Gaussian Processes (GPs) as regression functions
- Experiment 1 Prediction
- Local models learn faster than full model
- High accuracy
- Experiment 2 Control
- Compute gradients
- Posture control
Forward Model (Prediction)
Inverse Model (Control)
- 3. Dealing with partial observability (7-DOF
simulated robot) - Experiment 3
- Hidden body part
- Higher-order local model
After first training example
After 10 training examples
- Future work
- Body part tracker using natural visual features
Yan and - Pollefeys, 2006
- Identify the physical/geometrical structure of
the robot, e.g. - for trajectory planning and obstacle
avoidance - Dynamic adaption of Bayesian network while
tool-use
Recommended
CrystalGraphics Presentations




























