
HISTOGRAM SPECIFICATION MATCHING - PowerPoint PPT Presentation
1 / 18
Title:
HISTOGRAM SPECIFICATION MATCHING
Description:
... (like a CCD camera) have many sensors located on a rectangular/square grid. ... (n2-1) fresh additions and one fresh multiplication (by 1/n2) each time we move ... – PowerPoint PPT presentation
Number of Views:58
Avg rating:3.0/5.0
Title: HISTOGRAM SPECIFICATION MATCHING
1
HISTOGRAM SPECIFICATION / MATCHING
2
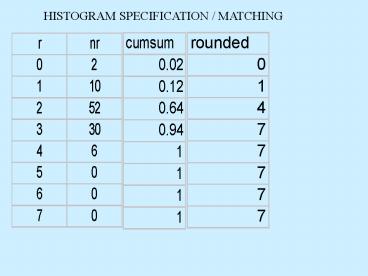
- Histogram Specification/Matching
- We specify a Histogram, which is not too
different from the input histrogram, but at the
same time, one which has a better contrast. - Then we look for the transformation which would
convert the input histogram to the target
histogram. - This is achieved by requiring that for each gray
level, the area under the histogram (upto that
level) should be same
3
? k ? l
4
Specified histogram
5
(No Transcript)
6
HISTOGRAM MATCHING/SPECIFICATION
7
OUTPUT DUE TO HISTOGRAM EQUALIZATION
8
HISTOGRAM SPECIFICATION
9
FILTERING IN THE SPATIAL DOMAIN
- Averaging is an example of filtering in the
spatial domain. - In averaging we choose a mask of size m x n
(centered) on the current Pixel. - We replace the current value of the gray level by
the average gray level of all the pixels in the
mask. - This is usually done to reduce noise.
10
How/why does averaging reduce noise? Noise is
assumed to be local (affects only a small
fraction of the total number of pixels).
Why? This is because most digital image capture
systems (like a CCD camera) have many sensors
located on a rectangular/square grid. Light
falling on each of the sensors is converted into
a signal. The output of each sensor can then be
read into a storage system (usually by
multiplexing). A sudden transient electrical
disturbance will then cause only a few pixels to
be affected.
11
Even if the noise affects many pixels, it is
assumed to be random (with zero mean), therefore
averaging will reduce the noise.
Computational issues in averaging If the mask
is of size n x n pixels, then it requires (n2-1)
fresh additions and one fresh multiplication (by
1/n2) each time we move the mask by one pixel.
How to reduce this number?
12
c1 c2 c3 c4
Add column wise , i.e., average for P1
(c1c2c3)/9 Rold Average for P2
(c2c3c4)/9 Rnew Rold-(c1-c4)/9
13
Therefore, computational advantage (for
additions) due to this algorithm (n1)/(n2-1)
1/n In general, linear filtering of an image
f(x,y) of size M x N with a filter mask of size m
x n is given by
a (m-1)/2 b (n-1)/2 The process of linear
filtering is also called convolving a mask with
the image
14
Weighted average
Weighted averaging is done to reduce the effect
of blurring of edges (which occurs in simple
averaging)
15
Results of averaging (smoothing)
Mask size (square) 3,5,9,15,35
As mask size increases, the effect of smoothing
is greater
16
Deliberate Blurring To get a simple
representation of a Complex image
17
Order-Statistics filters Eg Median filter
Replace current gray value by the median of all
the gray values in the mask.
18
- 3 x 3 Median Filter
- Arrange the 9 gray values which fall within the
filter in ascending/descending order. - Choose the 5th value in the list. This is by
definition, the median of the 9 numbers - Median filter is very good at eliminating salt
and pepper noise (impulse noise) - Does not lead to blurring of edges (as much as
simple averaging filters)