
7'6 The solution of state equations and the transition matrix - PowerPoint PPT Presentation
1 / 80
Title:
7'6 The solution of state equations and the transition matrix
Description:
Therefore, we obtain the Transition Matrix for discrete-time systems. ... Based on the transition matrix, we can re-write X(k) as ... – PowerPoint PPT presentation
Number of Views:727
Avg rating:3.0/5.0
Title: 7'6 The solution of state equations and the transition matrix
1
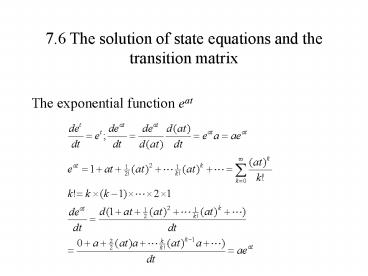
7.6 The solution of state equations and the
transition matrix
- The exponential function eat
2
7.6 The solution of state equations and the
transition matrix
- The matrix exponential eAt is defined as
3
7.6 The solution of state equations and the
transition matrix
4
7.6.1 The transition matrix
- For a given continuous system,
- we can obtain the solution as the follow.
- First, we can re-write the equation as
5
7.6.1 The transition matrix
- Pre-multiplying both sides of the above equation
by e-At, we obtain - Integrating the preceding equation between 0 and
t gives
6
7.6.1 The transition matrix
- Or
- Pre-multiplying both sides by eAt, we have
7
7.6.1 The transition matrix
- That is
- Suppose the input is zero, at time t0 we have
8
7.6.1 The transition matrix
- The solution of the state equation starting with
the initial condition X(t0) is
9
7.6.1 The transition matrix
- The output of the system is
- The matrix eAt?(t) is called as Transition
Matrix.
10
7.6.2 Properties of the transition matrix
- Given the transition matrix ?(t) eAt, then
- ,
11
7.6.3 Calculation of the transition matrix
- As
- apply Laplace transform to the above equations,
we have
12
7.6.3 Calculation of the transition matrix
- Finally we have
- That means we can use inverse Laplace transform
to calculate the transition matrix.
13
7.6.4 Examples of the transition matrix
calculation
- Example 1 Given the transfer function of a
system as the follow, - find its transition matrix?(t).
14
7.6.4 Examples of the transition matrix
calculation
- First, find its state equations,
- then,
15
7.6.4 Examples of the transition matrix
calculation
- Next, find the inverse,
16
7.6.4 Examples of the transition matrix
calculation (cont)
- Finally, calculate the transition matrix,
17
7.7 State variable feedback
- For a continuous-time system given by,
- suppose that all the state variables are
accessible, a new feedback scheme state
variable feedback can be implemented.
18
7.7 State variable feedback
u(t)
r(t)
y(t)
X(t)
C
-
KT
19
7.7 State variable feedback
- How does this closed loop system
behave?where u(t)r(t)-KTX(t), KTk1 k2...
kn.
20
7.7 State variable feedback
- Substitute u(t) into the above state equations,
we have
21
7.7 State variable feedback
- For these state equations, we can find the
transfer function as
22
7.7 State variable feedback
- Example 2 Given the system transfer function as
- suppose a state variable feedback scheme is
implemented for this system, find its closed loop
transfer function and draw a diagram to show the
implementation.
23
7.7 State variable feedback
- First, find its state equations A, B and C.
24
7.7 State variable feedback
- According to the controllable canonical form, we
obtain - where
25
7.7 State variable feedback
- Then the closed loop transfer function is
26
7.7 State variable feedback
- Finally we have
- This means that the characteristic equation roots
may be placed anywhere in the s-plane by choice
of state variable feedback coefficients.
27
7.7 State variable feedback
- The implementation is shown as the follow
r(t)
y(t)
X(t)
C
-
KT
28
7.7 State variable feedback
- First, the original system can be implemented as
the follow
x3
e(t)
x2
y(t)
x1
u(t)
?
?
a
?
?
-5
-4
29
7.7 State variable feedback
- Then, the system with state variable feedback can
be implemented as the follow
-k3
x2
x3
x1
y(t)
r(t)
u(t)
?
?
?
?
?
a
-5
-4
-k2
-k1
30
7.8 Transition matrix for discrete-time state
equations
- For a discrete-time system,
- we will present the solution by a recursion
procedure and then by the z-transform method.
Finally, we discuss methods for computing
(zI-A)-1.
31
7.8.1 Solving discrete-time state equations
- The solution for any positive k may be obtained
directly by recursion, as follows
32
7.8.1 Solving discrete-time state equations
- By repeating this procedure, we obtain
- Clearly, X(k) consists of two parts, one
representing the contribution of the initial
state X(0) and the other the contribution of the
input u(j), where j0,1,2,k-1. The output y(k)
is given by y(k)CX(k).
33
7.8.1 Solving discrete-time state equations
- Notice that it is possible to write the solution
as the follow if the input is zero. - as
- where ?(k) is a unique n?n matrix satisfying the
condition
34
7.8.1 Solving discrete-time state equations
- Therefore, we obtain the Transition Matrix for
discrete-time systems. This transition matrix
contains all the information about the free
motions of the system from initial conditions.
Based on the transition matrix, we can re-write
X(k) as
35
7.8.2 Computing of transition matrix using
z-transform
- Consider the discrete-time system described as
the follow - Applying the z-transform of both sides of the
above equation, we get
36
7.8.2 Computing of transition matrix using
z-transform
- Applying the inverse z-transform of both sides of
the above equation, we get - Comparing the above equation with
- We obtain
37
7.8.2 Computing of transition matrix using
z-transform
- Example Obtain the transition matrix of the
following discrete-time system - Solution find the state equations,
38
7.8.2 Computing of transition matrix using
z-transform
- That is
- As
- therefore, we need to find out the inverse
39
7.8.2 Computing of transition matrix using
z-transform
- That is
40
7.8.2 Computing of transition matrix using
z-transform
- The transition matrix ?(k) is now obtained as the
follows
41
7.8.2 Computing of transition matrix using
z-transform
- That is
42
7.8.2 Computing of transition matrix using
z-transform
- Assume that the initial state is given by
- And the input is unit step function, find the
y(k). - Solution Substitute transition matrix into the
formula below, we have
43
7.8.2 Computing of transition matrix using
z-transform
44
7.8.3 State variable feedback control
For a discrete-time system given by, suppose
that all the state variables are accessible, a
new feedback scheme state variable feedback can
be implemented.
45
7.8.3 State variable feedback
46
7.8.3 State variable feedback
How does this closed loop system
behave?where u(k)r(k)-KTX(k), KTk1 k2...
kn.
47
7.8.3 State variable feedback
Substitute u(k) into the above state equations,
we have
48
7.8.3 State variable feedback
For these state equations, we can find the
transfer function as
49
Tutorial
- Exercise1 Given system differential equation as
below, - Suppose the state variables are chosen as
x1(t)?(t) and x2(t)d?(t)/dt, find out - The state equations.
- The state equations in form of A, B C.
- The system transfer function using A, B C.
- The transition matrix ?(t)
50
Tutorial
- Solution As x1(t)?(t), x2(t)d?(t)/dt and
- we have
51
Tutorial
A, B and C
52
Tutorial
System transfer function
53
Tutorial
Transition matrix
54
Tutorial
Exercise 2 Given find the transition
matrix?(t) (answer is on study book page 7.24).
55
7.9 Derivation of discrete models from continuous
ones
- For a given continuous-time system,
- we can obtain the solution as the follow.
56
7.9 Derivation of discrete models from continuous
ones
- For a given discrete-time system,
- we can obtain the solution as the follow.
57
7.9 Derivation of discrete models from continuous
ones
- If given a continuous-time system in state
equation form, you are required to design a
computer controlled system. Or other way around,
given a discrete-time system, you are looking for
the output in continuous-time domain. In these
cases, how can you manage that? - Direct derivation
- Via transfer function
- Other methods
58
7.9.1 Discrete-time system with ZOH
- As for the continuous-time system
- During the sample interval
- So that
59
7.9.1 Discrete-time system with ZOH
- Now make a change of variable in the integral
that is, let - so that
- when
- and when
- This changes the solution to
60
7.9.1 Discrete-time system with ZOH
- Then we have the discrete-time solution
- As we know that
- Therefore is the plant matrix,
- the driving matrix, and C is the connection
matrix as the continuous one.
61
7.9.2 Steps of discrete model derivation
- 1. Derive the continuous state equations
- 2. Compute
- then
62
7.9.2 Steps of discrete model derivation
- 3. Compute
- 4. Finally we have
63
7.9.3 Examples of discrete model derivation
- Example Derive the discrete-time system
corresponding to the following continuous-time
system when a ZOH circuit is used. - Notice Suppose there is a ZOH if not given.
64
7.9.3 Examples of discrete model derivation
- 1. Derive the continuous-time state equations
- Applying Laplace transform to the both sides of
the differential equation.
65
7.9.3 Examples of discrete model derivation
- Write the state equations in controllable
canonical form - That is
66
7.9.3 Examples of discrete model derivation
- 2. Compute eAt and eAT
67
7.9.3 Examples of discrete model derivation
- 2. Compute eAt and eAT.
68
7.9.3 Examples of discrete model derivation
- 3. Compute ?.
69
7.9.3 Examples of discrete model derivation
- 4. Finally we have
70
7.9.3 Examples of discrete model derivation
- Example Obtain the discrete-time state and
output equations and the transfer function of the
following continuous-time system (T1)
71
7.9.3 Examples of discrete model derivation
- Write the continuous-time state equations in
controllable canonical form
72
7.9.3 Examples of discrete model derivation
- Compute eAt and eAT
73
7.9.3 Examples of discrete model derivation
- Compute ?
74
7.9.3 Examples of discrete model derivation
- Finally we have
- As T1
75
7.9.3 Examples of discrete model derivation
- The transfer function
76
7.9.4 Other approaches to the discretization
- The same transfer function can be obtained by
taking z-transform of G(s) when it is preceded by
a sampler and ZOH.
77
7.9.4 Other approaches to the discretization
- Matlab has a convenient command to discretize the
continuous-time state equation - into
- The command is
- ?,?c2d(A, B, T)
78
7.9.4 Other approaches to the discretization
- Example
- A0 10 -2
- B01
- Ad,Bdc2d(A,B,1)
- Ad 1.0000 0.4323
- 0 0.1353
- Bd 0.2838
- 0.4323
79
Reading
- Study book
- Module 7 State space and transition matrix (Page
7.1 to 7.16)
80
Exercise
- Exercise 1 Given a continuous-time system as
below, - if this system is sampled with T1 sec, represent
the sampled system in the form as
Recommended
CrystalGraphics Presentations





























