
Integration of an Inertial Navigation Unit into a Motion Control System - PowerPoint PPT Presentation
1 / 1
Title:
Integration of an Inertial Navigation Unit into a Motion Control System
Description:
To accomplish this task accelerometers and gyroscopes have been used for this design. ... Two planes of accelerometers mounted perpendicular each other are ... – PowerPoint PPT presentation
Number of Views:53
Avg rating:3.0/5.0
Title: Integration of an Inertial Navigation Unit into a Motion Control System
1
Integration of an Inertial Navigation Unit into a
Motion Control System
Author Adam Kerr Supervisor Gordon Wyeth
Motivation for Inertial Sensors The motivation
behind this thesis is to increase the low level
skills of the RoboRoos by removing error from the
data that would otherwise be fed into the motion
control loop. The main performance benefit lies
in the area of reducing wheel slip allowing
better path tracking. This has been specifically
aimed at improving the performance of the
RoboRoos. This system replaces the current wheel
encoder block in the feedback loop with a black
box.
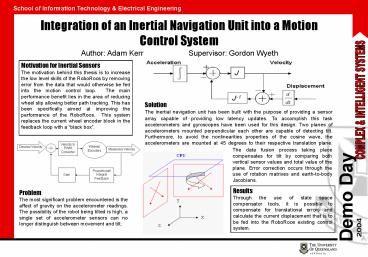
Solution The inertial navigation unit has been
built with the purpose of providing a sensor
array capable of providing low latency updates.
To accomplish this task accelerometers and
gyroscopes have been used for this design. Two
planes of accelerometers mounted perpendicular
each other are capable of detecting tilt.
Furthermore, to avoid the nonlinearities
properties of the cosine wave, the accelerometers
are mounted at 45 degrees to their respective
translation plane. Adam
The data fusion process taking place compensates
for tilt by comparing both vertical sensor values
and total value of the plane. Error correction
occurs through the use of rotation matrixes and
earth-to-body Jacobians.
Results Through the use of state space
compensator tools, it is possible to compensate
for translational errors and calculate the
current displacement that is to be fed into the
RoboRoos existing control system.
Problem The most significant problem encountered
is the affect of gravity on the accelerometer
readings. The possibility of the robot being
tilted is high, a single set of accelerometer
sensors can no longer distinguish between
movement and tilt.
Recommended
CrystalGraphics Presentations





























